
Tech Blog
Search our Tech Blog:
Integration with Qinsy Hydrographic Data Acquisition Software
Via straightforward integration to Qinsy, FarSounder’s customers gain access to sophisticated hydrographic processing capabilities and rich views of the incoming data streams.
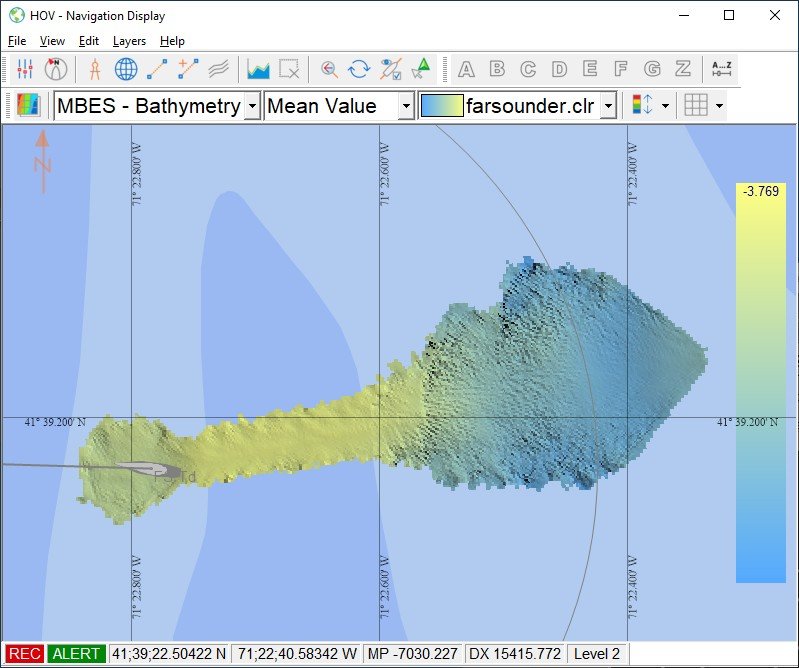
What is Local History Mapping™?
All Argos sonar systems use FarSounder’s SonaSoft™ processing software for processing and display. Real-time sonar data is displayed via a 3D representation in the 3D Viewer and also in a “top down” representation overlaid on an ENC chart. In addition to detecting the seafloor ahead of the vessel and navigation hazards in front of the vessel in real-time, a history of bathymetric data is stored as the vessel moves along its route. This data is an average of the seafloor detections over all of the pings that contained this area. It is most commonly displayed with color mapped to depth. Essentially, a map of the seafloor is created from the vessel’s recent history and displayed for operator use.
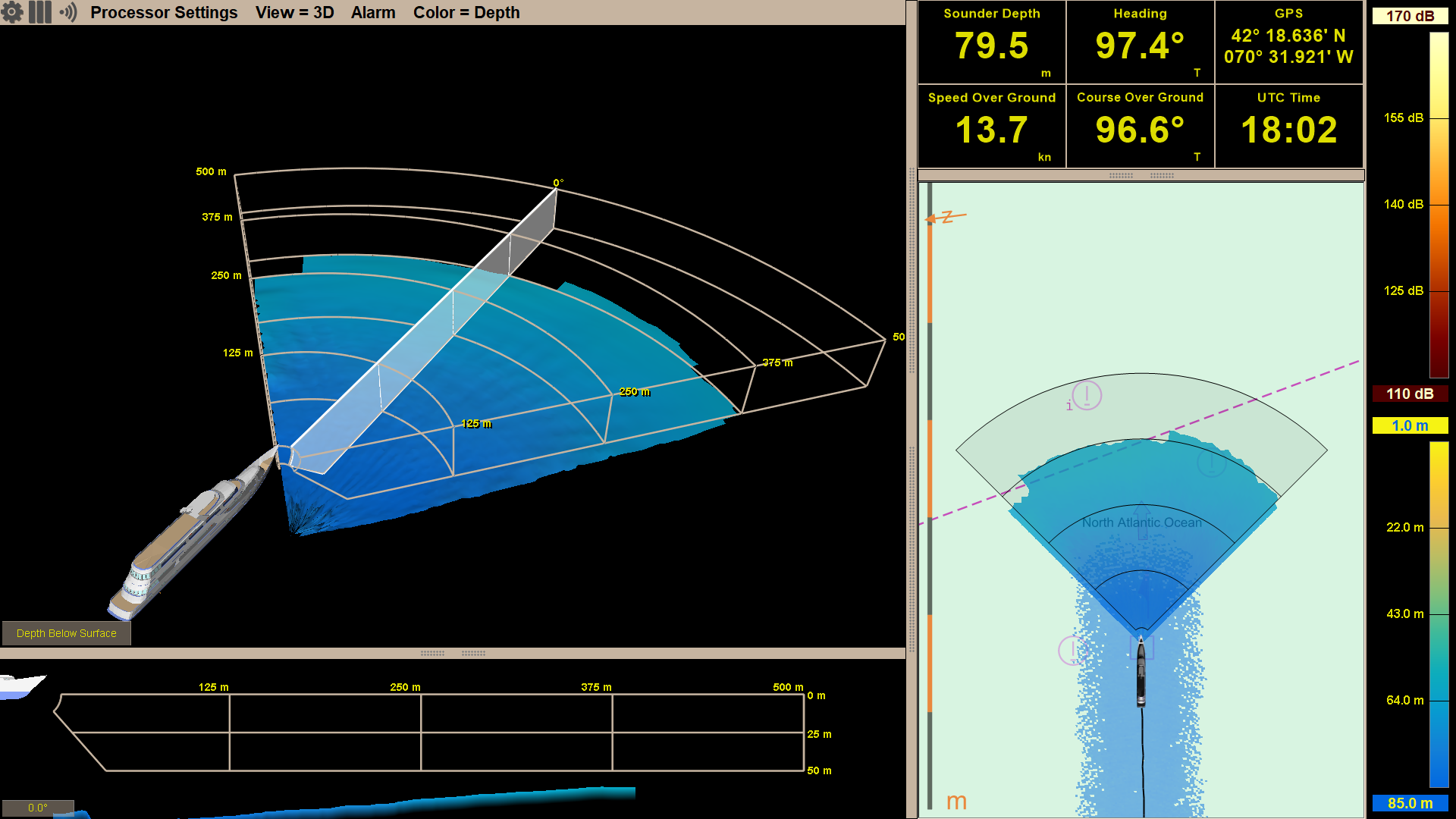
Shallow and Deep Water Bottom Mapping Capabilities
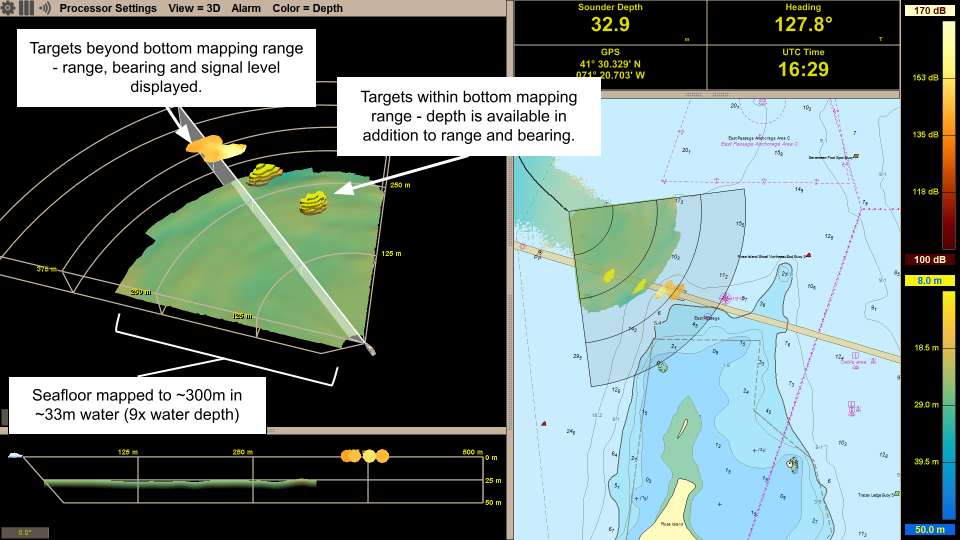
FarSounder Argos 3D forward looking navigation sonars look for both the seafloor and potential navigation hazards anywhere in the water column ahead of the vessel. Hazards in the water column are detected as in-water targets and can be detected out to full range of the sonar (dependent upon target size). While the maximum in-water target detection range is a set distance for each product, maximum bottom detection range is not. The maximum bottom detection range, or bottom mapping range is dependent on the depth of water below the transducer module, not the Argos model.
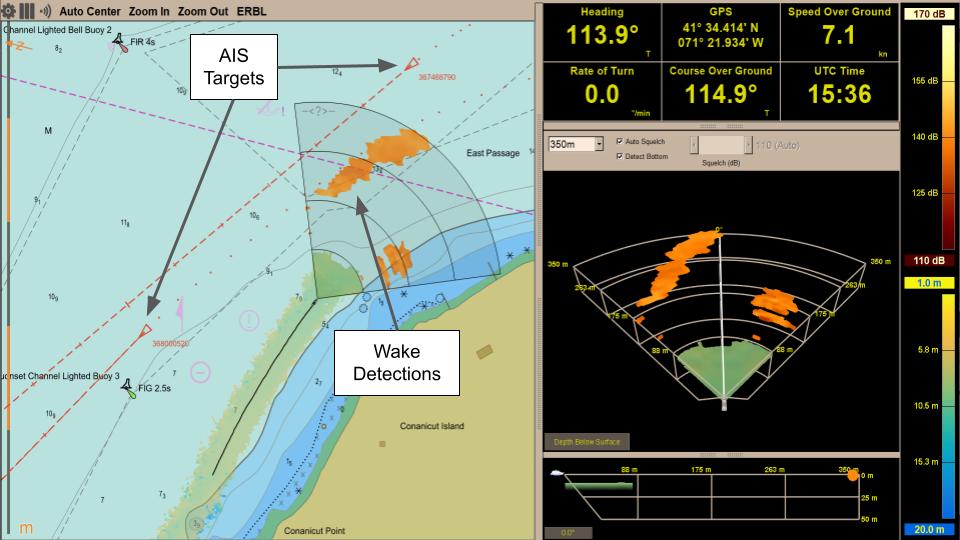
AIS and ARPA Overlays: Adding Situational Awareness to Sonar Data
In recent updates, FarSounder added support for displaying AIS (Automatic Identification System) targets and ARPA (Automatic Radar Plotting Aid) targets in the Chart Overlay display in SonaSoft™ – the sonar processing and display software for Argos navigation sonars. These features raise situational awareness for the vessel operator and add to the utility of the system, here’s how!
Argos Integration into Autonomous Systems
In the most common use of the Argos 3D Forward Looking Sonar (FLS) systems designed for real time navigation, the “vessel operator” is a human, or a crew, interacting with a computer display of the sonar output on the bridge of a vessel. However, as technology advances, vessels are moving more towards operating autonomously. In this case, “vessel operator” means something like a navigation control system. A number of projects incorporating autonomous navigation are either already in the water or currently underway.

Overcoming Real World Navigation Challenges
The reality is there are limitations to traditional navigation tools, and the goal of the marine navigation technology industry is finding new ways to improve situational awareness. One innovative technology developed with this goal in mind is real-time 3D Forward Looking Sonar. For many mariners, including this type of state-of-the-art, proven technology into their workflow is a top priority.
Expedition Sourced Data Collection Program: Progress Update
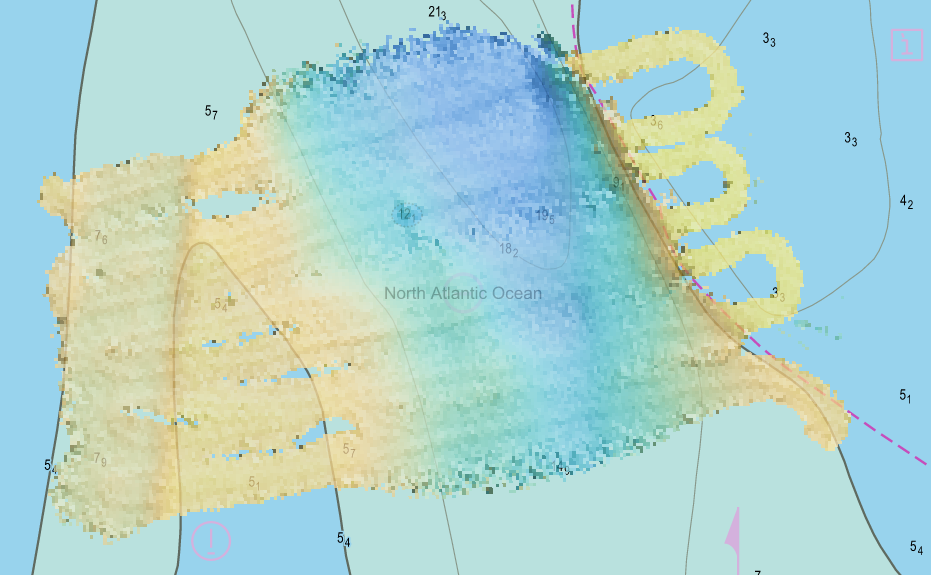
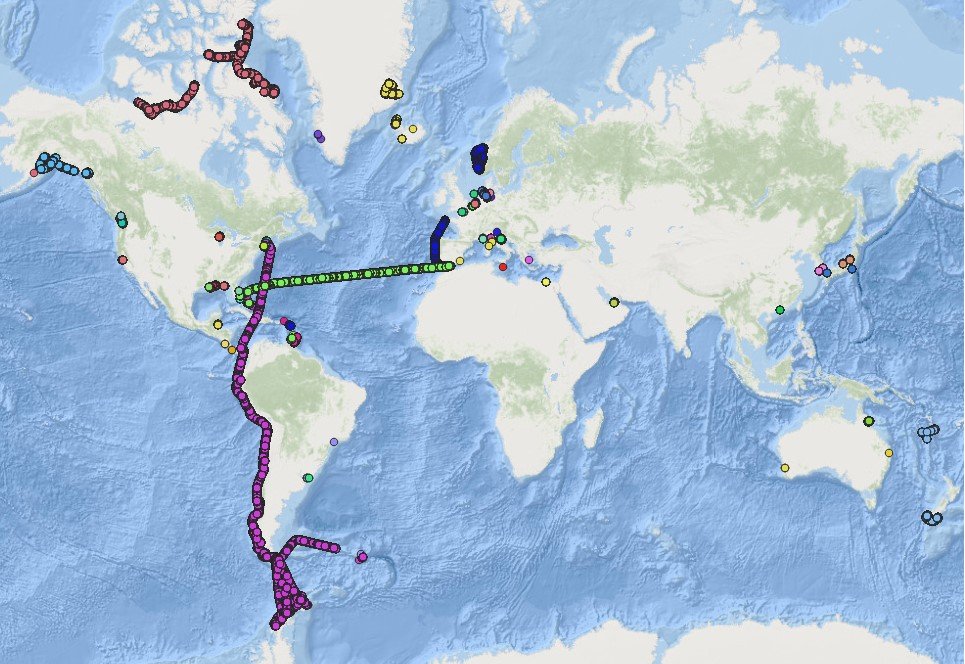
FarSounder has been collecting sonar data from customers in remote locations around the globe for a few years now. We have received more than 30 TB of sonar data from customers’ expeditions. The data collected is from many fascinating areas including a transit of the Northwest Passage, from Boston to Antarctica, following the west coast of South America, and the South Pacific. When in poorly charted or uncharted waters, the interesting bathymetric features and navigational hazards that can be observed in this data are invaluable. As an example of a case where these are present in the data, below is an overview of some of FarSounder’s bathymetric data from our local waterway, Narragansett Bay.

Video: Introduction to Argos Navigation Sonars
An introduction and overview of the FarSounder Argos 3D Forward Looking Sonar (3D-FLS) navigation products. This video explains the components of the system and how they function. It also describes the most common features of FarSounder's SonaSoft™ processing software and how they are displayed on the user interface.

Surveying the Seafloor: Looking Ahead to See Below
What is under the water in front of your ship right now? With the use of only charts, radar, and other traditional methods, this can be a difficult question to answer. This is where FarSounder’s forward looking navigation sonar comes in, and through both research and collaboration, FarSounder is able to conduct numerous survey projects in the Northeast.
A First Look at Expedition Sourced Data
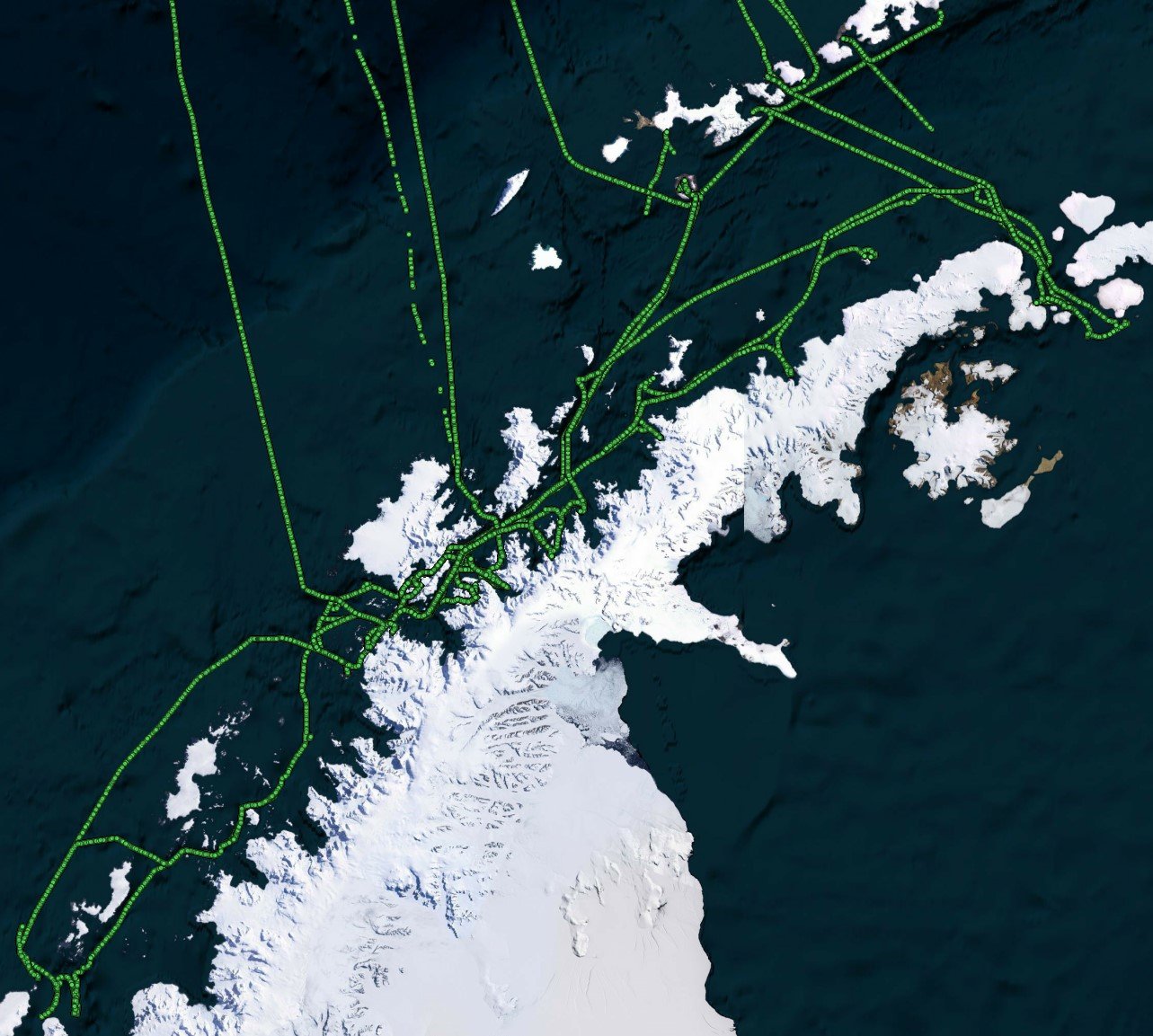
Recently, FarSounder launched an Expedition Sourced Data Collection program allowing customers to record data during their normal operations. We already have a fleet of customers collecting data as they use FarSounder's real-time 3D-FLS to increase safety in their day-to-day operations. Some of the exciting areas they are exploring include the arctic and antarctic waters, as well as the Caribbean.
Collecting Bathymetric Data using a 3D Forward Looking Sonar
Over the past 14 years, the use of 3 dimensional forward looking sonar (3D FLS) for real-time navigation has been adopted globally by a growing number of vessel operators. FarSounder’s 3D FLS technology insonifies the area (the sonar’s field of view) ahead of the vessel (up to 1000m) and allows navigators to determine not only the range and bearing to navigational hazards within the field of view, but also their depth in the water column. In addition to real-time information about navigational hazards, the depth of water ahead of the vessel is also obtained. Determining the depth of the seafloor ahead of the vessel as measured by a 3D FLS is useful for real-time navigation, but are there other applications for this data?

Applications of Today’s 3D Forward Looking Sonar (OCEANS17)
Abstract: Currently, the main application of commercially available three-dimensional forward looking sonar (3D FLS) technology is for real-time vessel navigation. Using 3D FLS technology, the vessel operator can detect not only the range and bearing to a navigational hazard, but also the depth of the hazard in the water column. However, 3D FLS is itself a nascent technology for which many exciting applications are yet to be realized. In this work, the current applications of 3D FLS are surveyed, and some useful metrics for the evaluation of a 3D FLS are defined. New possible applications of 3D FLS are introduced. Performance for all known commercially available 3D FLS products according the FLS metrics previously defined is summarized. Finally, some of the differences in applicability for current and emerging applications of the most robust 3D FLS systems are discussed.
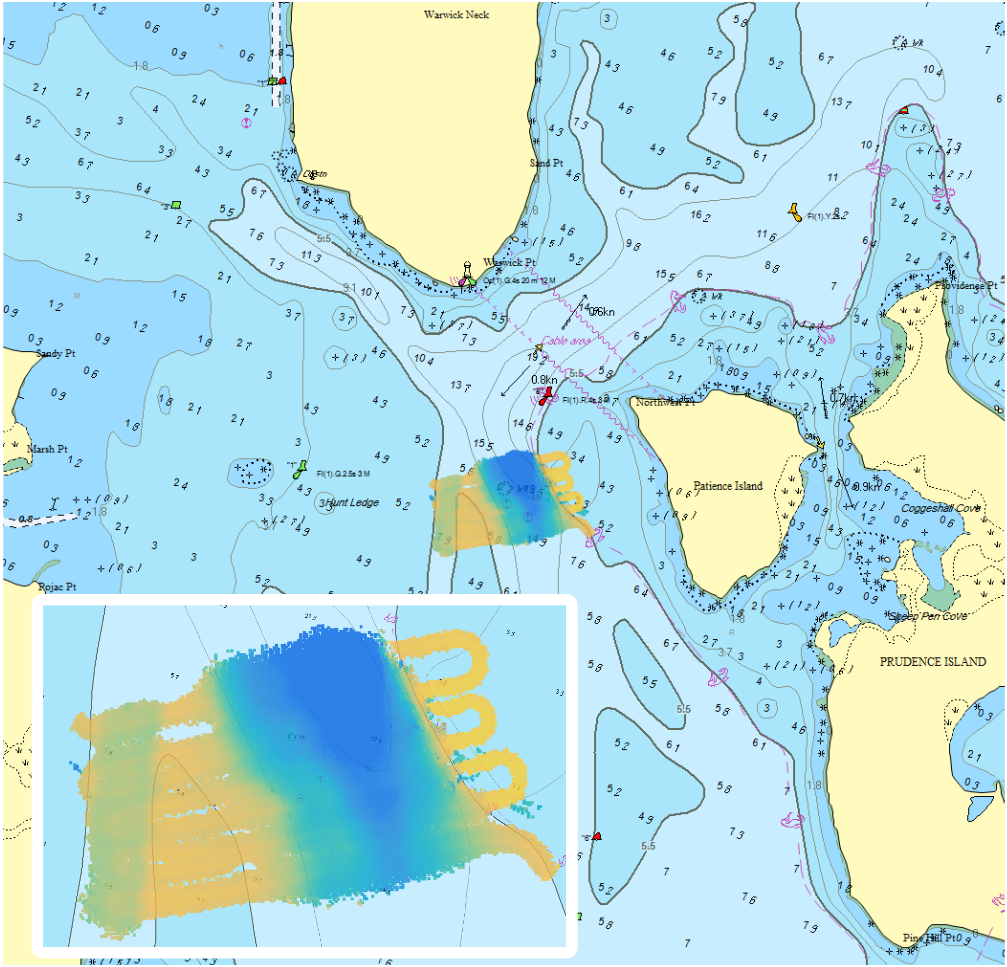
Performance of 3D Forward Looking Sonar for Bathymetric Survey (OCEANS17)
Abstract: Over the past 13 years, the use of 3-dimensionalforward-looking sonar (3D FLS) for real-time navigation has been adopted globally by a growing number of vessel operators. More recently, FarSounder started collecting bathymetric data using 3D FLS sonars in Forward Looking Multi-beam (FLMB) mode. Before exploring all of the possible applications of collecting bathymetric data on vessels with an installed 3D FLS navigation system, the accuracy and limitations of this data should first be understood. In this paper, results from two small surveys using a FarSounder 3D FLS in FLMB mode are presented and analyzed. The survey depths are corrected for tide height and compared to NOAA survey data. The average absolute error in depth is found to be 6.6 and 2.2% in the Patience Island and Newport Bridge survey area, respectively. Further, the average survey swath width is computed from the data recorded as ~9 water depths at ~6 knots.