
Tech Blog
Search our Tech Blog:
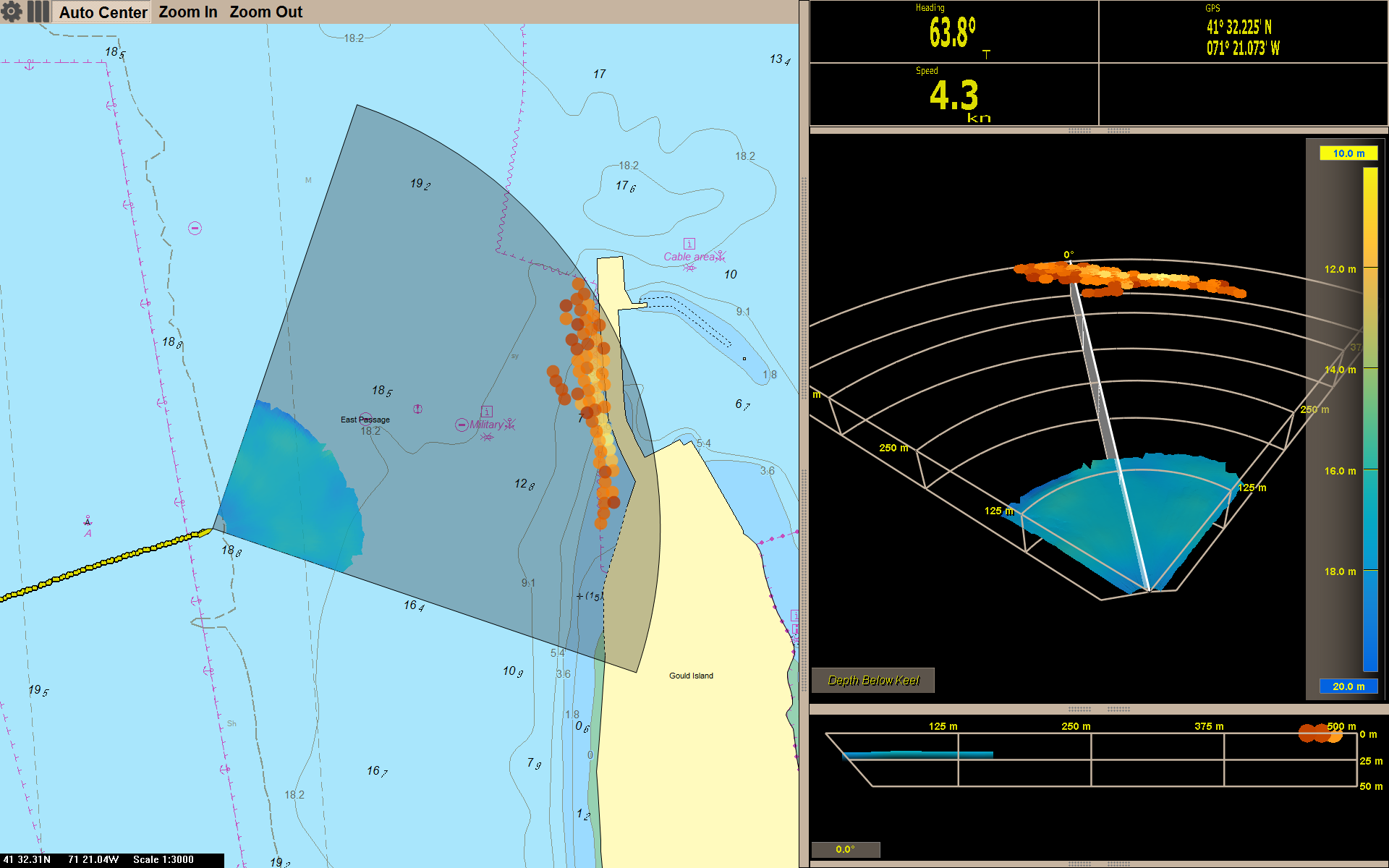
Seeing the Big Picture: Expanded Chart Overlay
Early in FarSounder’s development, we added a raster chart display to help our engineers correlate what we saw in the sonar display with what was in the real world. The raster chart display evolved to a vector chart display. Soon after that, we started displaying in-water targets on top of the chart. Now, with the release of SonaSoft 3.0, our software includes an expanded overlay with the complete 3D sonar image. The seafloor and in-water targets are shown with the same colors as the 3D Sonar Display as an overlay on top of the chart data. Many users will find that the Chart Display will become their primary display rather than the 3D Sonar Display since it shows a more complete situational awareness with both chart and sonar data.

Look Ma, No Hands! Next Generation Sonar Processing
One of the exciting characteristics of our 3D FLS products is that with each release of our software we unleash more and more of the sonar sensor hardware’s full potential. This means that our performance and capabilities will continue to get even better via software updates without requiring new sensor hardware. Over the past year, the FarSounder engineering team has been focusing on improving our automated sonar processing algorithms and image quality. We’re excited to announce our next generation auto-squelch and bottom detection algorithms.

Orange is the New Rainbow: Introducing FarSounder’s New Color Mapping
With the launch of SonaSoft 3.0, we’ve decided to make a paradigm shift in how we display our sonar data. Previously, our software always used a colormap based on jet (a.k.a “rainbow”) for both depth and signal level color mapping. Not only did this prevent displaying depth and signal level information in a single display, the colormap itself was not optimal. We now use two separate colormaps for depth and signal level. A multi-color, uniform luminance gradient colormap is used to indicate depth while an orange-copper colormap is used to indicate signal level.

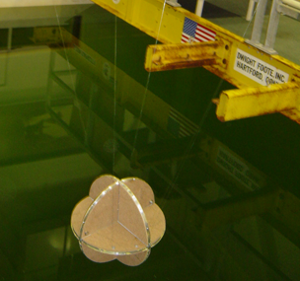
FarSounder's Acoustic Test Tank Facility
We’ve just completed the finishing touches on a brand new test tank facility in our main office. Our primary motivation for building this new facility was to increase our production productivity, since every sonar unit we produce is tank tested and calibrated before shipment. Our previous tank was located in a warehouse about 3 miles (~5 km) from our offices. Compared to our old tank, the new one is larger, deeper, and WAY more convenient.

Practical Installation Requirements: No Need for Sonar Domes
With a well designed installation, FarSounder sonars have no need for a sonar dome. This blog posting summarizes why domes are sometimes used with other sonar technologies and why our products don’t require them.

Upgrading an FS-3DT to an Argos 500
The Argos 500 has the same mechanical footprint as our legacy FS-3DT product. It uses the same transducer array and stainless steel pressure case which means existing legacy FS-3DT users can easily upgrade their system to a Argos 500 for a fraction of the cost of a new Argos 500.
Best Practices for Navigating with 3D FLS
Our navigation sonars have been designed for ease of operation on a variety of vessels, from small yachts to large commercial vessels. We've spent countless hours refining our user interface designs and improving the signal processing that enables our sonars to look ahead at navigationally significant ranges. Part of the power of our systems is that we don't force the user to conform to one particular mindset: users can operate with color mapped to depth or color mapped to signal strength; the 3D sonar display can be set to a top down orthographic projection or a rotatable 3D perspective; we offer a profile display which slices a vertical strip through the 3D data. The list goes on and on. Along the way, we try to make these displays natural and lead the user to their ideal configuration. We know that everyone visualizes the world around them differently and we continually solicit input from our users on how make our user interfaces work best for them.

Cold Water Testing
When the temperatures start to drop well below freezing, most of the boat traffic on the Narragansett Bay disappears. Even if we would prefer to stay indoors by a fire or head for warmer waters, the FarSounder engineering team continues on water testing new sonar innovations. Recently, a few of the team boat tested FarSounder's latest 3D forward looking sonar equipment: our new bulkhead mount Power Module and our new flat faced Transducer Module option for the FarSounder-1000 and SPS systems. Though setting up the equipment in the morning was quite frigid, we had beautiful calm waters, interacted with a pod of porpoises and spent a little time watching harbor seals bask on the rocks. We thought we'd share a little bit of a "typical" work day on the water.
The 3D FLS Operator Experience: Making a Good Sonar Great
FarSounder's engineers spend a lot of their time working with customers to understand their navigation sonar needs. We strive to design our 3D FLS products with a good balance of performance metrics. However, our systems are more than just hardware. The software display is an important component too and as the saying goes, "a picture is worth a thousand words". That's why we've invested heavily in our operator interface, making a system that is easy to operate and easy to understand. Let's take a closer look at some of these features.

Comparing Forward Looking Sonars for Navigation
As with many technical products, understanding the differences between navigation sonar products sold by different vendors can be confusing. Much of the technical product literature can be confusing with different companies assigning different meanings to similar terms. At trade shows, we are often asked "What's the difference between Company X's product and yours?" or "Which is a better? FarSounder's sonars or Company B's sonars?". We don't like to presume we know every detail about every sonar on the market. Rather, we believe that once a customer understands which metrics they should be considering they can easily choose the best "look ahead sonar" for them. For our customers' class of ships, we're confident that they will choose a FarSounder. In this blog posting, we'll take a look at what we feel are the most important metrics you should use to compare forward looking sonars: Coverage Zone and Update Rate.
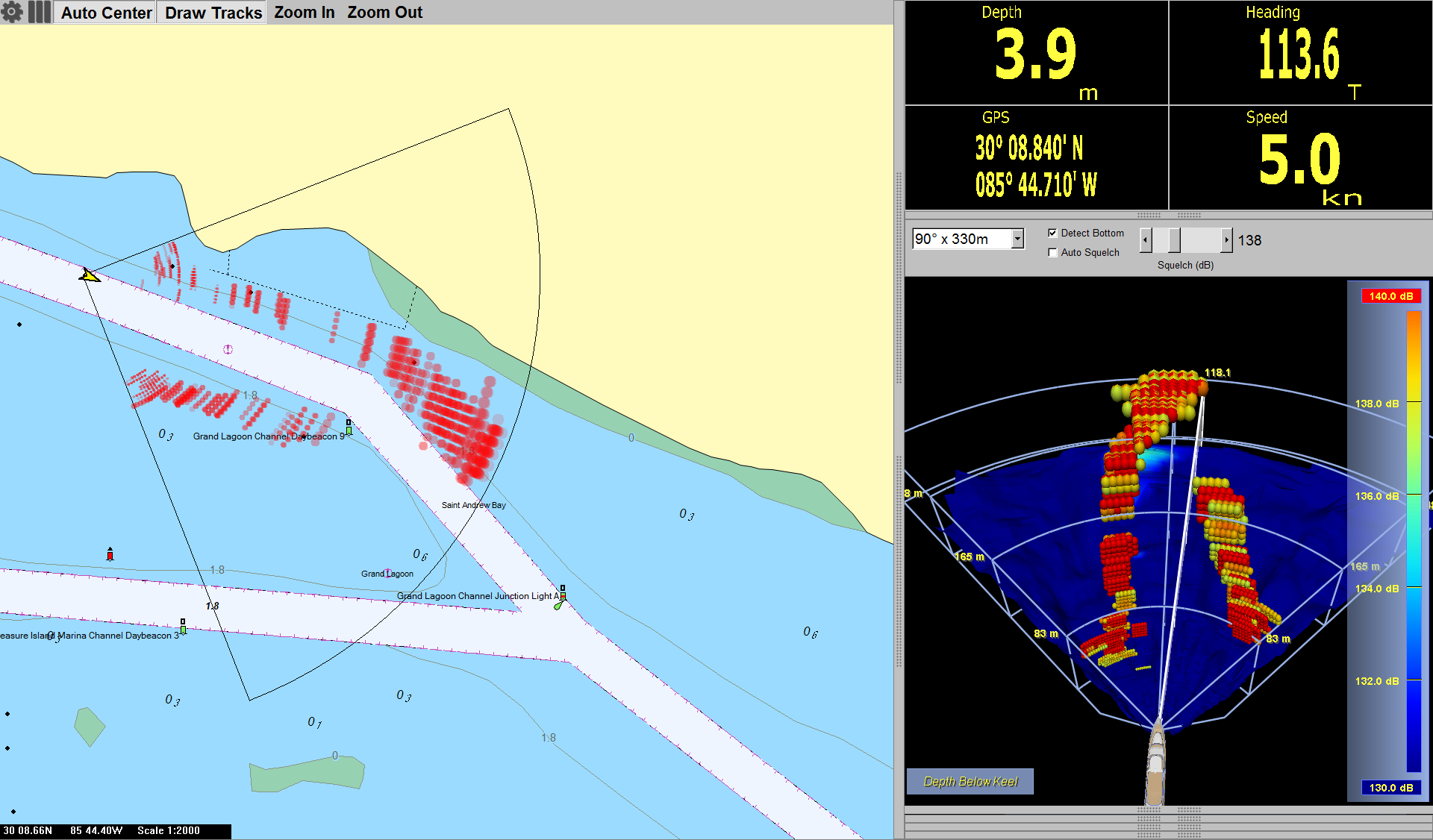
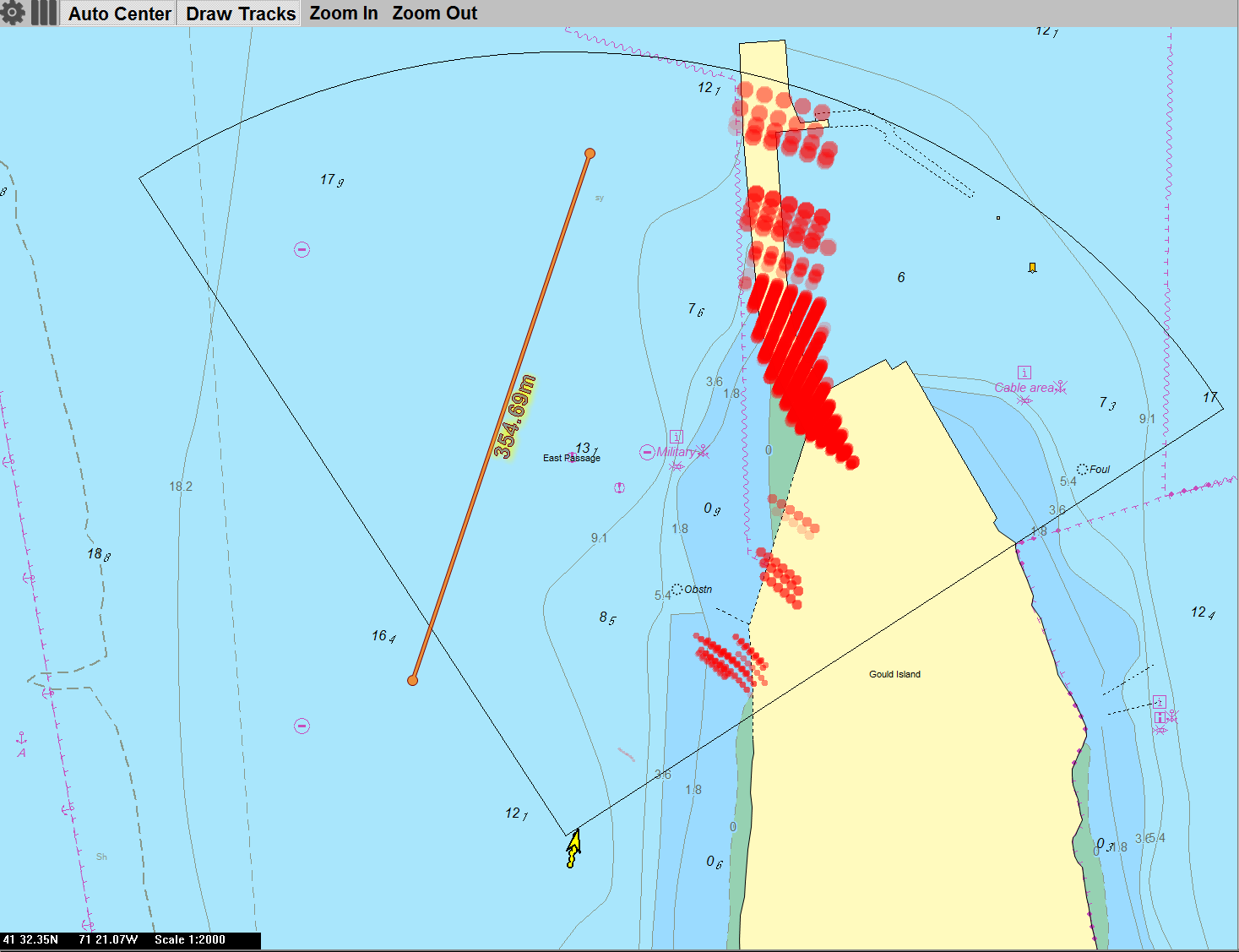
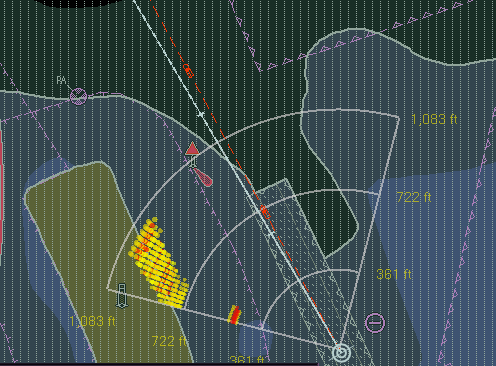
Chart Overlay Makes Collision Avoidance Easier
When looking at our software's 3D Sonar display it is sometimes difficult to correlate what we see on the screen to what we see (or don't see) out the bridge window. However, many users are used to correlating what they see on a radar display, especially if they have a radar overlay on top of electronic nautical charts. In our continuing efforts to improve user experience, we've recently added chart overlay of in-water sonar targets to our software. This enables users to more quickly and easily make the jump from what they see on the sonar's display to where potential navigation obstacles are located.
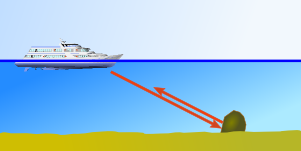
Explaining the Water Depth Limit and Other Unexpected Reflections
Not all forward looking sonars are created equal. Most only produce a view of a single 2 dimensional slice. Some use scanning technology to build an image from multiple pings. Few employ 3D technology. FarSounder sonars are the only look-ahead sonars which produce a true 3-dimensional image at navigationally significant ranges. They do this with a single ping enabling a fast update rate. Clearly, range is an important metric. However, one number alone cannot fully describe a sonar's range capabilities. A navigation sonar should specify its range not only in terms of maximum detection range for a given in-water target size, but also maximum range at which it can map the bottom. The first range metric is a number that is easy to specify given a target's reflectivity (e.g Target Strength) in a nominal marine environment. The second number is more difficult because it is not fixed. Rather, the bottom mapping range of a forward looking sonar is primarily a function of the water depth below the transducer. This blog posting explains what drives this limit and how these same concepts can explain other “unexpected” echo reflections.

Applications of Navigation Sonar Related to Ice
Navigation in and around ice is a very important topic for vessels destined for the arctic or antarctic waters. The rise of adventure cruising, scientific expeditions, and commercial shipping through these areas is keeping the topic in the forefront of many conversations. Ship operators in these areas are interested not only in detecting and avoiding icebergs but in some cases also knowing how close they can get to ice that is clearly visible above the water. Navigation in such areas is clearly reliant on seaman experience. Since the sinking of the RMS Titanic, engineers around the world have been working on ways to detect icebergs using various sonar technologies. In this blog post, we summarize how FarSounder's 3D sonars can be used to navigate in sea ice conditions and how our obstacle avoidance sonars can be installed on ice classed vessels.
Ground-Truth: Seeing What's There and Not What Isn't
The ultimate purpose of our 3D sonar products is very simple. We want to let users see dangers hidden under the water's surface. With our forward looking navigation sonars, this means seeing the obstacles that ship operators want to avoid. In terms of our ship protection systems, this also means seeing underwater intruder threats. This objective seems straight forward. However, the marine world is a complicated environment with lots of objects that can reflect sonar signals. Sometimes localized environmental conditions can even prevent sonar signals from propogating effectively. We want to make sure that the output from our sonars reflect (pun intended) the reality of what is under the water. This means that somehow we need to get an idea of what is actually there to determine if the outputs of our sonars are correct. This information is called "Ground Truth" and is the bain (or bounty) of every scientist and engineer who works on sensing technologies. It is impractical to cover all the procedures and techniques of effectively collecting ground truth data for a marine field-test in a blog posting. However, we can highlight a few interesting aspects of this never ending quest that makes working at FarSounder so interesting.

Doing it for Science: 3D Forward Looking Sonar for Research Vessels
As FarSounder's customer base grows, we are continually learning about new applications for our navigation sonar products. As a marine company focused on engineering unique technologies, we obviously have an interest in the greater world of marine science. Though we do not study the occean per se, our products can be used as tools to help others study the ocean. This blog entry is intended to highlight some of the applications of our 3D navigation sonars for Research Vessels. With these products, we hope not only to provide safer navigation to users but also add some compelling reasons to add our tool to the researcher's arsenal of tools.

Installing New Sonar on Old Vessels: Breaking Down the Refit Process
For an end user new to FarSounder sonars, the idea of retrofitting a sonar into an existing hull can seem daunting. However, once the details are examined, the process is relatively straight forward. Approximately 50% of our customer installations are refits to older hulls. Even some of the New Builds that have our sonars have approached integration of our systems as a "refit" when our products have been added to the ship's specifications late in the build process. When beginning to consider one of our 3-dimensional forward looking navigation or diver detection sonar systems, potential customers are often concerned with the installation design process and any potential hydrodynamic impact on the hull. These are important questions to which we believe there are some simple answers. The purpose of this blog posting is to explain the basics of refitting a vessel for our 3-dimensional forward looking navigation and diver detection sonar systems.
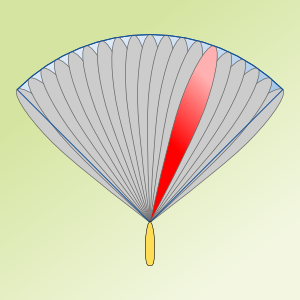
Advantages of Array Processing Over Scanning Sonar
When considering a sonar product for use in navigation, it is important to consider a number of parameters and system characteristics. Obviously, the ability to look ahead is important. However, "where", "how", and "when" the sonar looks ahead are characteristics that will determine if a particular sonar is suitable for navigation and practical obstacle avoidance. A sonar's overall system design impacts these characteristics significantly. Scanning sonars are one of the most common system designs for advanced sonar solutions as they are relatively inexpensive and relatively small. This makes them a good solution for many applications. Unfortunately, real-time navigation is not one of them. This blog post illustrates the advantage of phased array processing sonars over scanning sonars for navigation applications.
Integrating into 3rd Party Products: Using FarSounder's SDK
Recently, we've decided make the standard SDK for our navigation product available to 3rd party developers free of charge for non-commercial applications. This makes sense in today's information driven world, since here at FarSounder, we are in the business of selling sonars and providing ship operators with the best underwater situational awareness possible. We're not in the business of selling closed APIs. This opens up an exciting number of possibilities for people interested in integrating FarSounder’s forward looking sonar data into their products.

Our Mobile Test Trailer: Fending Off Snow, Rain, and Sun
One of the aspects of working at FarSounder that is pretty exciting to our team is all the field testing we do. We make sure that all of our developers, engineers, and sales staff get a chance to participate in some level of testing in order to make sure everyone has a solid understanding of our product. We develop 3D forward looking sonars and diver detection systems primarily for ship based solutions. Obviously, this means that we do a lot of testing on various vessels around the world. For the most part, these vessels are big enough to have nice cabins for our equipment and to shelter us from the elements.
Using Forward Looking Sonar in Multibeam Surveys
A number of FarSounder's installations are on survey vessels. The most obvious use of our 3D forward looking sonar products is to provide realtime obstacle avoidance information to the survey vessel. By definition, if an area is being surveyed, then the bathymetry is unknown. These customers can use our equipment to help protect the very expensive survey equipment. Certainly, if the survey is part of a post dredging verification, the risk of damaging equipment is low.